概述
我又被迫营业了
- (又是数学内容)
线性代数
- 算术与代数;线性算术
- 线性变换
- 线性变换的应用
- 计算机图形学
- 线性方程组
算术与代数;线性算术
算术 (Arithmetic) 和代数 (Algebra)
小学的 “算术”
- 给一个 “表达式” 和一系列 “等价变换” 规则,求出表达式的值
- $(3 + 4) \times 5 = 7 \times 5 = 35$
- $753 + 672 = 1300 + 120 + 5 = 1425$
中学的 “代数”
- 允许表达式中出现代表某个数值的 “变量”;表达式依然成立
- $x^2 - 2x - 3 = 0 \Rightarrow x\in \{ -1, 3 \}$
为什么 “代数” 比 “算术” 更难?
- 算数是 “阅读程序写结果”;代数是 “编程序”
- 编什么样的程序是不显然的
- $x^2 - 2x - 3 = 0 \Rightarrow x^2 - 2x + 1 - 4 = 0$
线性系统
“在变量均匀变化时,值也是均匀变化”
- $z = x + y$ (线性)
- $z = x \cdot y$ (非线性)

为什么线性系统如此重要?
- 非线性系统在微观尺度的时候表现是线性的
- $e^x = 1 + x + \frac{x^2}{2!} + \frac{x^3}{3!} + \ldots $
- 这是一个增长很快的函数
线性算术:向量和向量的运算
向量 (vector): 一个 $n$ 维的数组,通常
- 可以理解成平面/空间中的一个点
$$ \vec{x} = \begin{bmatrix} 3 \\ 4 \\ 1 \end{bmatrix}\qquad \vec{y} = \begin{bmatrix} 1.5 \\ -2 \end{bmatrix} $$
向量的 (线性) 算术
- (
加法 ) 每个维度分别相加 - (
数乘 ) 每个维度分别乘以同一个常数
$$ \begin{bmatrix} 3 \\ 4 \\ 1 \end{bmatrix} + \begin{bmatrix} -1 \\ 0 \\ 1.5 \end{bmatrix} = \begin{bmatrix} 2 \\ 4 \\ 2.5 \end{bmatrix}\qquad 3 \begin{bmatrix} 3 \\ 4 \\ 1 \end{bmatrix} = \begin{bmatrix} 9 \\ 12 \\ 3 \end{bmatrix} $$
为什么叫 “线性算术”?
加法和乘法的分配律:$x \cdot (a + b) = x \cdot a + x \cdot b$
$$ \begin{bmatrix} x \\ y \\ z \end{bmatrix} = \begin{bmatrix} x \\ 0 \\ 0 \end{bmatrix} + \begin{bmatrix} 0 \\ y \\ 0 \end{bmatrix} + \begin{bmatrix} 0 \\ 0 \\ z \end{bmatrix} = x \begin{bmatrix} 1 \\ 0 \\ 0 \end{bmatrix} + y \begin{bmatrix} 0 \\ 1 \\ 0 \end{bmatrix} + z \begin{bmatrix} 0 \\ 0 \\ 1 \end{bmatrix} $$
空间中的任何一个点都可以写成是三个坐标轴方向的 “相加”
- 所以 “一个点” 也可以理解成 “源点出发的一个箭头”
线性变换
向量的新运算:线性变换
把三个单位向量 “偷梁换柱”,即可实现任意向量的变换
$$ \begin{bmatrix} 1 \\ 0 \\ 0 \end{bmatrix} { \color{red} \to } \begin{bmatrix} a \\ b \\ c \end{bmatrix} \qquad \begin{bmatrix} 0 \\ 1 \\ 0 \end{bmatrix} { \color{red} \to } \begin{bmatrix} d \\ e \\ f \end{bmatrix} \qquad \begin{bmatrix} 0 \\ 0 \\ 1 \end{bmatrix} { \color{red} \to } \begin{bmatrix} g \\ h \\ i \end{bmatrix} $$
$$ \begin{bmatrix} x \\ y \\ z \end{bmatrix} { \color{red} \to } \begin{bmatrix} ax + dy + gz \\ bx + ey + hz \\ cx + fy + iz \end{bmatrix} $$
大家熟悉的 “矩阵乘向量!”
- 矩阵的三个列向量分别代表三个坐标轴变换后的新坐标轴
然后……我们会编程啊!
这是一个代表 “坐标变换” 的数学定义:
$$ \begin{bmatrix} a & b & c \\ d & e & f \\ g & h & i \end{bmatrix} \cdot \begin{bmatrix} x \\ y \\ z \end{bmatrix} = \begin{bmatrix} ax + by + cz \\ dx + ey + fz \\ gx + hy + iz \end{bmatrix} $$
我们可以编程把它展现出来!
- 在这个方面做得好的是 3Blue1Brown
- 强烈推荐大家观看
- 开源可视化工具 https://3b1b.github.io/manim 和中文社区
惊喜时刻
图形 = 点的集合
$$ \begin{bmatrix} a & b & c \\ d & e & f \\ g & h & i \end{bmatrix} \cdot \begin{bmatrix} x \\ y \\ z \end{bmatrix} = \begin{bmatrix} ax + by + cz \\ dx + ey + fz \\ gx + hy + iz \end{bmatrix} $$
不就是
- 能不能在 linear.py 的基础上更进一步
- 把图形和图形的变换画出来?
- Linear Transformation: lt.py
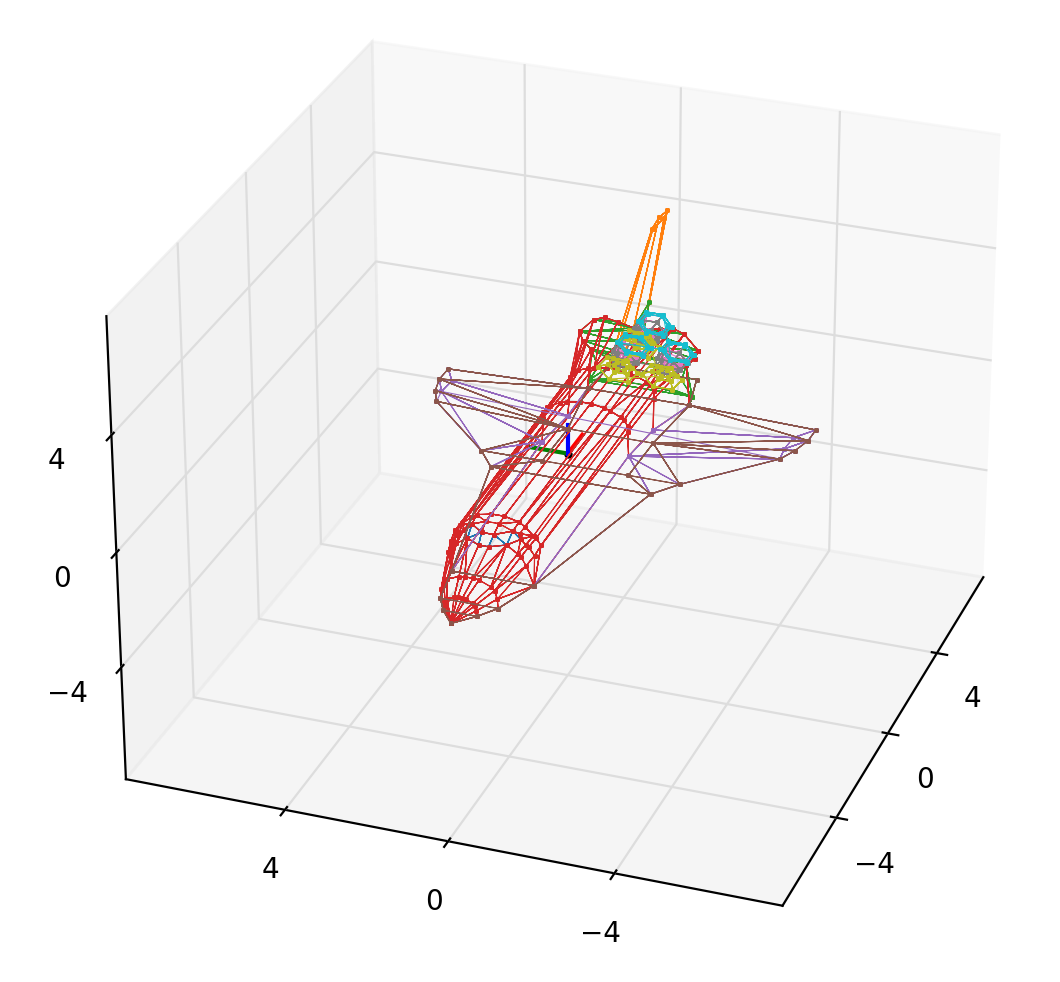
- 例子:shuttle.obj
- 这个文件就像是算法竞赛里的输入!
几个特殊的线性变换
$$ \begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \\ \end{bmatrix} \quad \begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 0 \\ \end{bmatrix} \quad \begin{bmatrix} 1 & 0 & 0 \\ 0 & 0 & 0 \\ 0 & 0 & 0 \\ \end{bmatrix} \quad \begin{bmatrix} 0 & 0 & 0 \\ 0 & 0 & 0 \\ 0 & 0 & 0 \\ \end{bmatrix} $$
借助代码,我们生成平滑的 “动画”
- 在 $t$ 时刻 ($0 \le t \le 1$),显示 $$(1-t) \begin{bmatrix} x \\ y \\ z \end{bmatrix} + t \left(A \begin{bmatrix} x \\ y \\ z \end{bmatrix}\right) $$
- 如果只有主对角线上有数值,就对应了坐标轴的拉伸
旋转坐标轴
简单改变一根坐标轴
$$ \begin{bmatrix} 1 \\ 0 \\ 0 \end{bmatrix} { \color{red} \to } \begin{bmatrix} a \\ b \\ c \end{bmatrix} $$
- 单位立方体被拉伸成了一个平行六面体
一个保持 “单位立方体仍然是单位立方体” 的旋转
$$ \begin{bmatrix} \frac{1}{\sqrt2} & 0 & \frac{1}{\sqrt2} \\ \frac{1}{2} & \frac{1}{\sqrt2} & -\frac{1}{2} \\ -\frac{1}{2} & \frac{1}{\sqrt2} & \frac{1}{2} \\ \end{bmatrix} $$
一些有趣的性质
对于任意线性变换
- 零永远映射到零
- $A \cdot 0 = 0$
- 推论:线性变换无法实现 “平移”
- 如果没有 “压扁”,就一定存在一个 “复原” 的线性变换
- 称为 “逆变换”
- $A^{-1} (A x) = x$
- 线性变换不可交换
- 先旋转再拉伸 $\ne$ 先拉伸再旋转
- 矩阵乘法 = 线性变换的复合
- 三个向量分别乘矩阵
线性变换与计算机图形学


一些有趣的 Tricks
线性变换不是不能平移的吗?
- 零永远映射到零
- $A \cdot 0 = 0$
- 推论:线性变换无法实现 “移”
- 在三位空间里不行,但四维空间就可以了
- grid2D 的例子
- 投影矩阵的推导就更复杂了
- 著名的 Games 101 课程 (现代计算机图形学入门)
- 目前的计算力还不支持游戏实时有限元级的仿真
- 于是我们看到了各种穿模、空气墙……
线性变换与线性方程组
线性变换意义下的方程组
“鸡兔同笼”
- 未知数 $x$, $y$ 可以看成
未知的向量 - 在给定的线性变换 $A$ 下,得到 $x' = 10, y' = 32$
$$ \left\{ \begin{matrix} x & + & y & = & 10 \\ 2x & + & 4y & = & 32 \\ \end{matrix} \right. $$
$$ \begin{bmatrix} 1 \\ 0 \\ \end{bmatrix} { \color{red} \to } \begin{bmatrix} 1 \\ 2 \\ \end{bmatrix} \qquad \begin{bmatrix} 0 \\ 1 \\ \end{bmatrix} { \color{red} \to } \begin{bmatrix} 1 \\ 4 \\ \end{bmatrix} $$
直觉:只要 $A$ 没有 “坍缩”,$A$ 对应的变换就是可逆的
- 逆变换只和 $A$ 有关,和等式右边无关
- 求出 $A^{-1}$ 就能求解任意线性方程组!
高斯消元法
线性变换
- 2D: 一个拉伸/旋转的平行四边形
- 3D: 一个拉伸/旋转的平行六面体
如何把线性变换 “变回” 单位立方体?
- 逐个坐标轴 “扳回” 单位向量
- 贪心算法
- 找到一个能使线性变换 “更正” 的线性变换 $X_i$
- $X_k \cdot \ldots \cdot X_2 \cdot X_1 \cdot A = I$
- $A^{-1} = X_k \cdot \ldots \cdot X_2 \cdot X_1 \cdot$
高斯消元中用到的两种线性变换
第三行所有系数乘以 $k$
- $z$ 轴拉伸 $k$ 倍
$$ \begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & k \\ \end{bmatrix} $$
第三行减去第一行
- $z$ 轴向 $x$ 轴负方向旋转 45 度
$$ \begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ -1 & 0 & 1 \\ \end{bmatrix} $$
高斯消元法
观察鸡兔同笼问题 “转过去” 再 “转回来” 的过程
$$ \begin{bmatrix} 1 & 1 \\ 2 & 4 \\ \end{bmatrix} \to \begin{bmatrix} 1 & 1 \\ 1 & 2 \\ \end{bmatrix} \to \begin{bmatrix} 1 & 1 \\ 0 & 1 \\ \end{bmatrix} \to \begin{bmatrix} 1 & 0 \\ 0 & 1 \\ \end{bmatrix} $$
JT3(JT2(JT1(JT(grid2d))))- 通用的算法
- 目标:消除主对角线之外的所有元素
- 方法:按照矩阵下三角的顺序消除
高斯消元法 (cont'd)
一些补充
- 如果目标轴被别其他向量 “占据” 了: $$ \begin{bmatrix} 0 & 1 & 0 \\ 0 & 0 & 1 \\ 1 & 0 & 0 \\ \end{bmatrix} $$ 就需要 “换元” (排列也可以写成矩阵)
- 如果 “目标轴” 和另一个向量很接近,就会引起计算误差
更一般的情形
刚才我们假设了 $A$ 是一个 3D → 3D 的映射
- 如果 $A$ 是 “坍缩” 的呢?
- 有更多的 $x$ 使得 $Ax = 0$!
- 再次观察坍缩的过程
$Ax = 0$ 和 $Ax \ne 0$ 包含了空间中的所有点
- 它们是 “垂直” 的!
总结
线性变换视角的矩阵
最符合人类直觉感受的理解方法
$$ \begin{bmatrix} 1 \\ 0 \\ 0 \end{bmatrix} { \color{red} \to } \begin{bmatrix} a \\ b \\ c \end{bmatrix} \qquad \begin{bmatrix} 0 \\ 1 \\ 0 \end{bmatrix} { \color{red} \to } \begin{bmatrix} d \\ e \\ f \end{bmatrix} \qquad \begin{bmatrix} 0 \\ 0 \\ 1 \end{bmatrix} { \color{red} \to } \begin{bmatrix} g \\ h \\ i \end{bmatrix} $$